
RESUMO

Sem tempo? A Lili IA resume para você
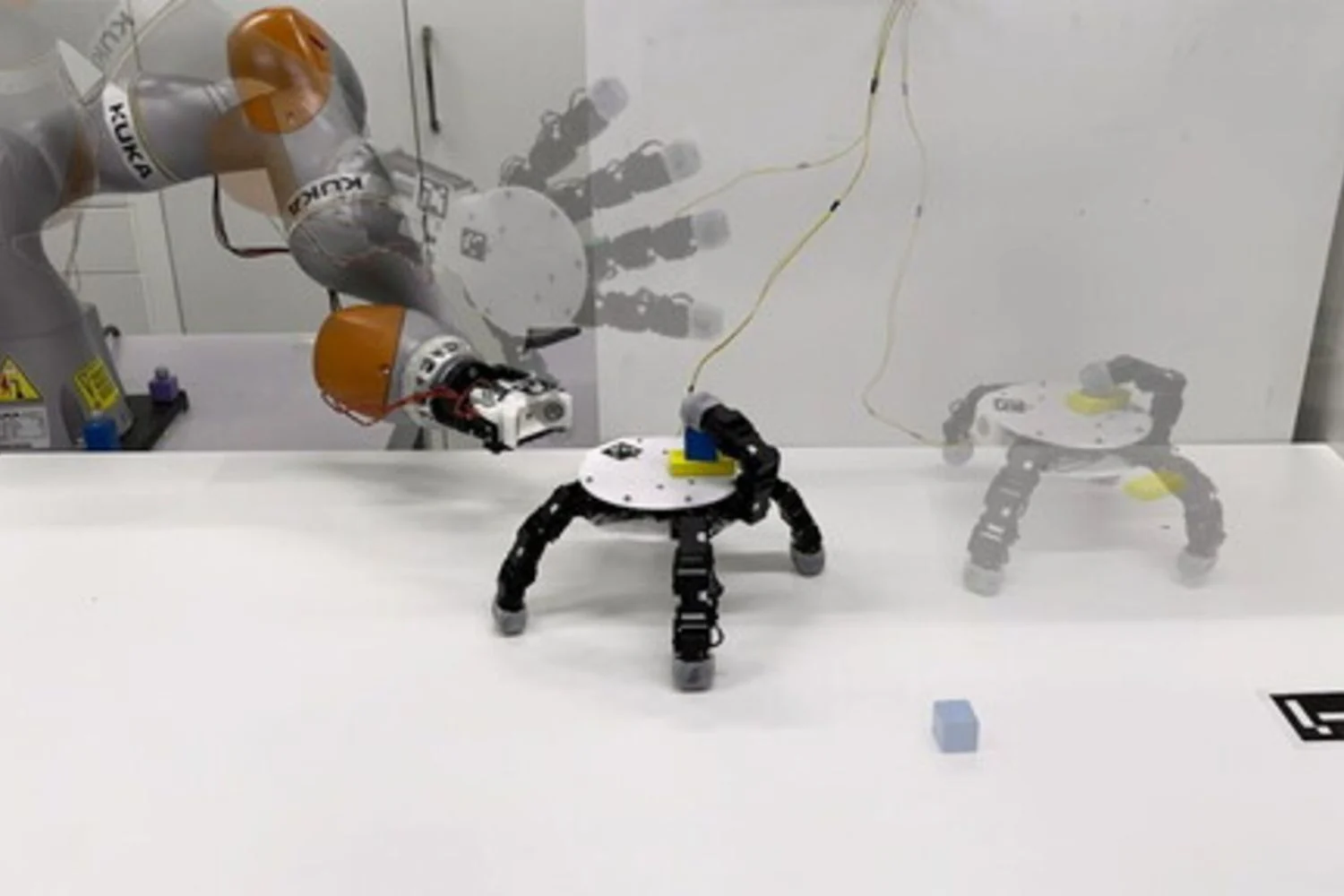
Um avanço na engenharia de corpos robóticos pode redefinir como sistemas automatizados interagem com ambientes complexos. Um estudo publicado na revista Nature Communications descreve uma mão robótica capaz de se separar do braço robótico ao qual está conectada, locomover‑se de forma autônoma e agarrar objetos como se fosse um pequeno robô independente. O trabalho foi liderado por Xiao Gao e sua equipe no Politécnico Federal de Lausanne (EPFL).

As mãos artificiais tradicionais tendem a reproduzir a assimetria da anatomia humana, oferecendo capacidade de preensão apenas por um lado e limitando o alcance à extensão do braço. Essas restrições tornam operações como recuperação de itens fora de alcance, manipulação simultânea de múltiplos objetos e acesso a espaços confinados logisticamente difíceis. A nova arquitetura, porém, propõe uma solução que atua nos alicerces da manipulação: a mão como módulo móvel e simétrico.
Os pesquisadores desenvolveram duas versões do protótipo, uma com cinco dedos e outra com seis dedos, sendo esta última equipada com um palmo de aproximadamente 16 centímetros de diâmetro. Em ambas as configurações, a mão destacável é capaz de se desprender da base montada no braço e deslocar‑se rastejando sobre a superfície de trabalho, preservando controle e força de preensão.
Nos experimentos descritos, a mão recuperou até três objetos em sequência, mantendo uma presa segura mesmo durante o reengate ao braço. O dispositivo foi capaz de segurar diversos objetos do cotidiano e suportar cargas de até 2 quilos. Segundo os autores, a mão replicou 33 tipos diferentes de pega humana, um nível de versatilidade incomum em manipuladores atuais.
Do ponto de vista sistêmico, permitir que a mão se separe do braço amplia o raio de ação do robô e cria novas rotas na topologia de interação entre máquina e ambiente. É uma mudança de paradigma semelhante a modularizar uma infraestrutura: em vez de transferir toda a carga por um único enlace rígido, o sistema pode redistribuir seus atuadores como nós móveis, otimizar caminhos e acessar áreas inacessíveis por um braço fixo. Em contextos urbanos ou industriais, essa modularidade funciona como camadas de inteligência que ampliam a eficiência do fluxo de trabalho.
As aplicações potenciais vão desde a robótica industrial e de serviço até missões de exploração ou intervenções em ambientes perigosos. Em manutenção e logística avançada, por exemplo, uma mão destacável pode entrar em cavidades estreitas, recuperar peças e retornar ao sistema principal, reduzindo a necessidade de ferramentas especializadas e operações humanas de alto risco.
Os autores reconhecem, entretanto, que há desafios a serem vencidos: aumentar a autonomia energética e de navegação da mão, aperfeiçoar algoritmos de controle para coordenação entre módulo e plataforma e integrar o sistema em robôs mais complexos. Esses passos são necessários para transformar o protótipo em um componente confiável de arquiteturas robóticas modulares.
Em suma, a pesquisa demonstra um progresso importante na concepção de membros robóticos como unidades autônomas e móveis. Para quem projeta cidades inteligentes, centrais de manutenção e sistemas logísticos, a evolução dos manipuladores modulares representa uma infraestrutura emergente que pode alterar discretamente a eficiência operacional e a segurança das operações no tecido urbano e industrial.



















{kind=link}